大语言模型(LLM)后训练数据准备相关笔记
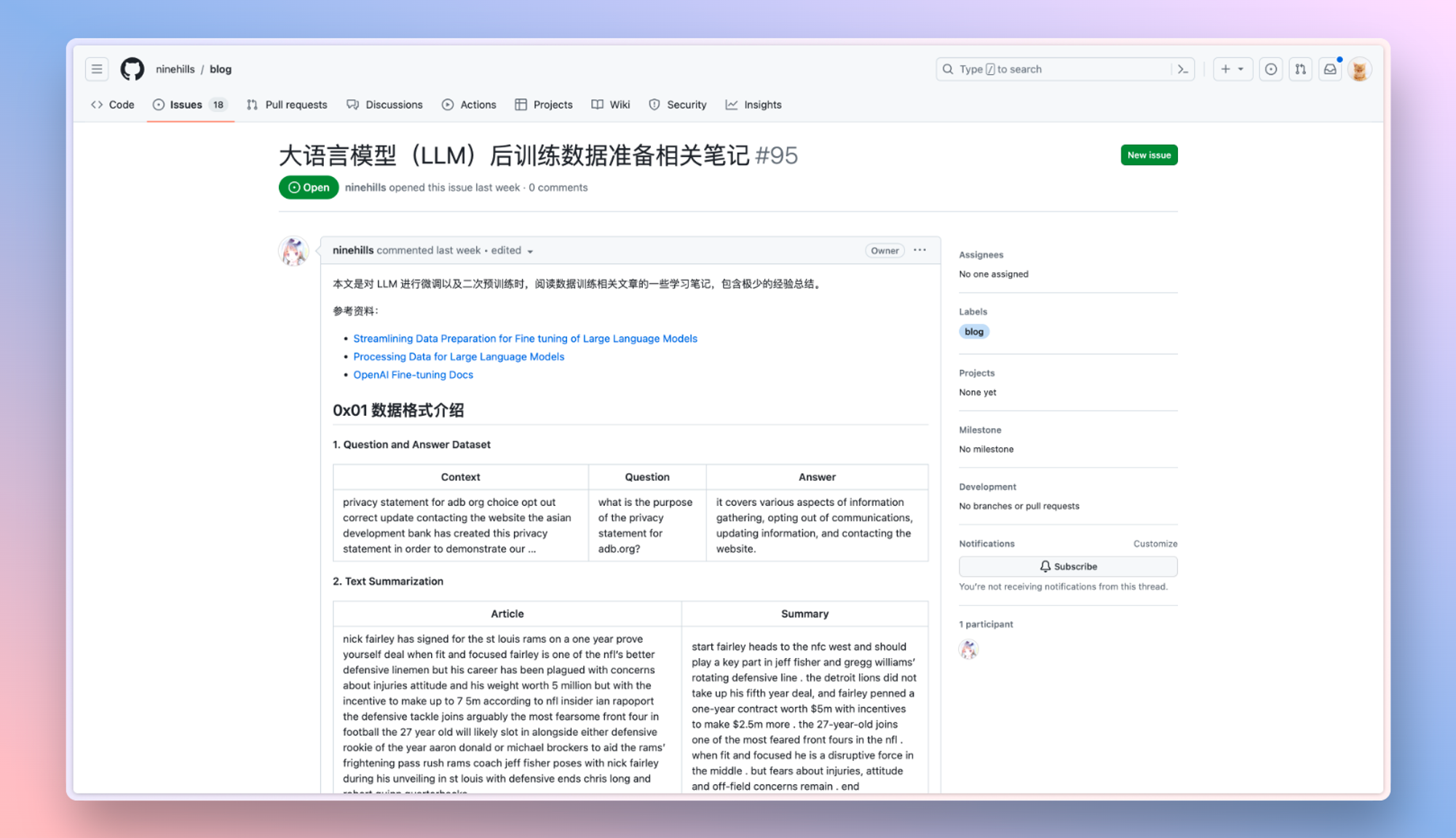
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
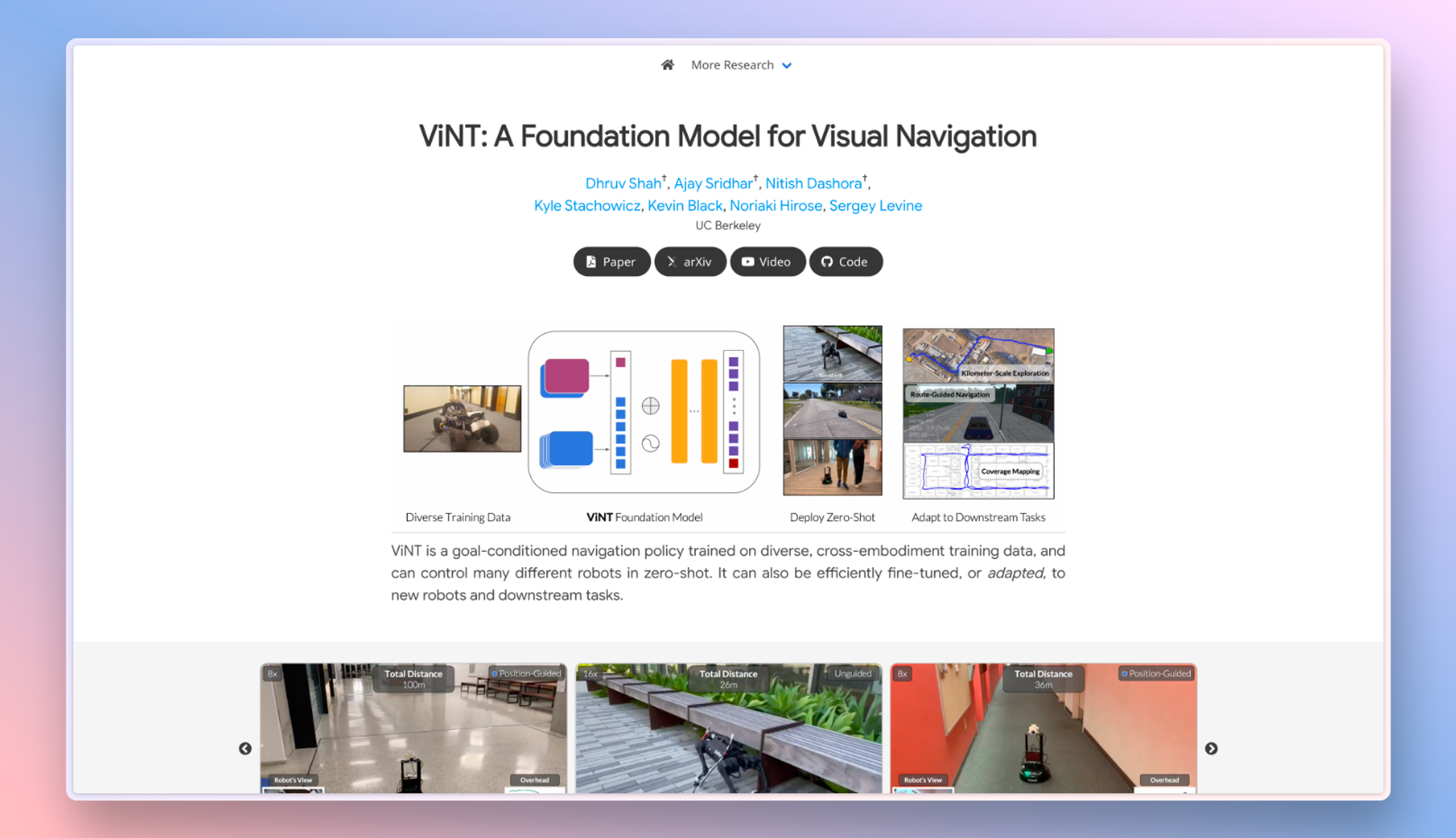
Visual Navigation Transformer ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transf...
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
Visual Navigation Transformer ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transf...
Visual Navigation Transformer ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transf...
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
大语言模型(LLM)后训练数据准备相关笔记 本文是关于对LLM进行微调和二次预训练时的学习笔记,包含了一些经验总结。参考资料包括了流程化大语言模型数据准备、OpenAI微调文档等。
Visual Navigation Transformer ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transf...
Visual Navigation Transformer ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transf...


