Visual Navigation Transformer
ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transformer-based架构进行编码,并通过图形规划器和启发式方法实现对新环境。

ViNT是一个目标条件的导航策略,通过多样化的跨体培训数据进行训练,可以零-shot控制许多不同的机器人。它还可以高效地进行微调或适应新的机器人和下游任务。ViNT使用Transformer-based架构进行编码,并通过图形规划器和启发式方法实现对新环境。

 Unichain 测试网水龙头信息
Unichain 测试网水龙头信息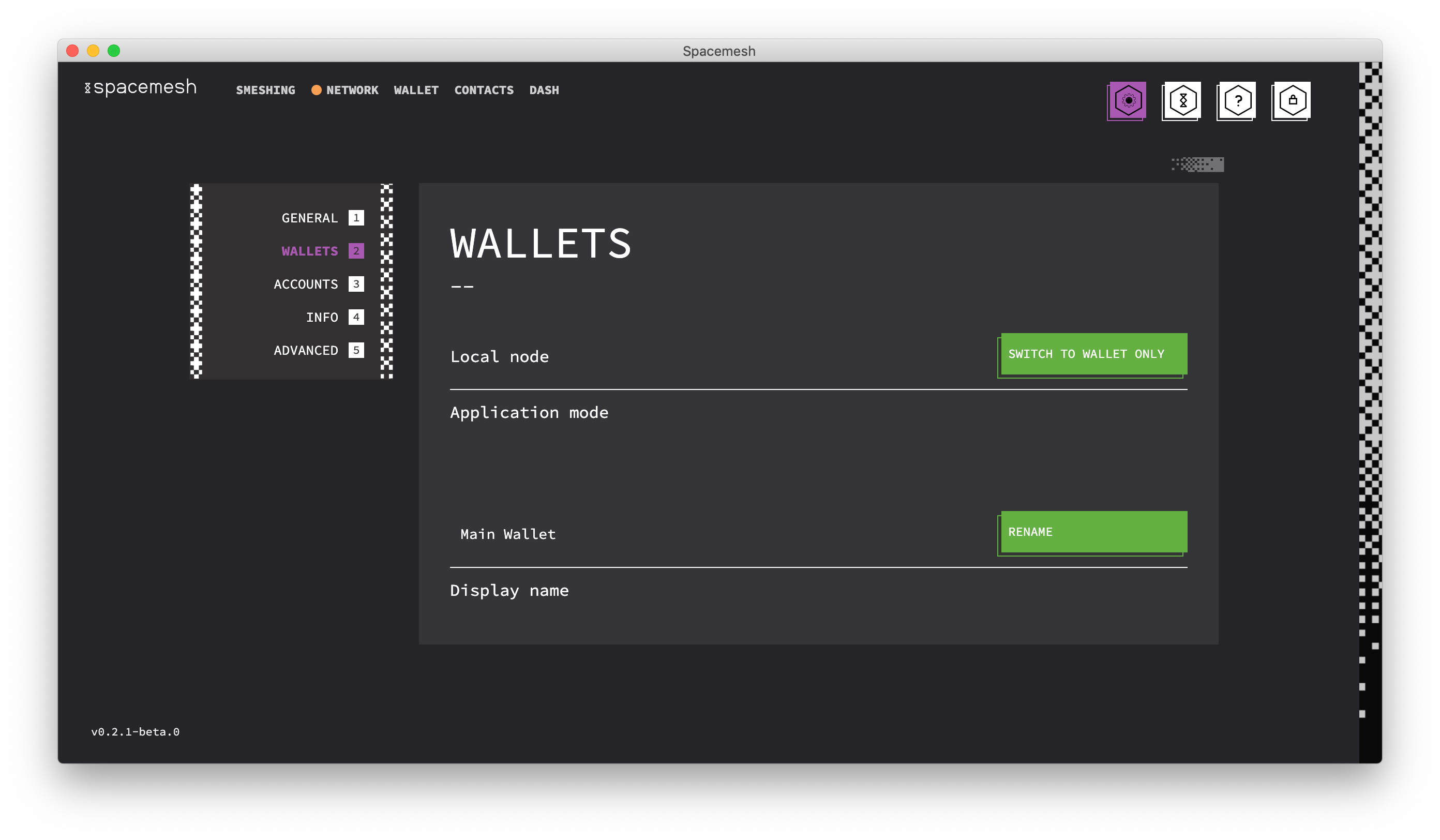 Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式
Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式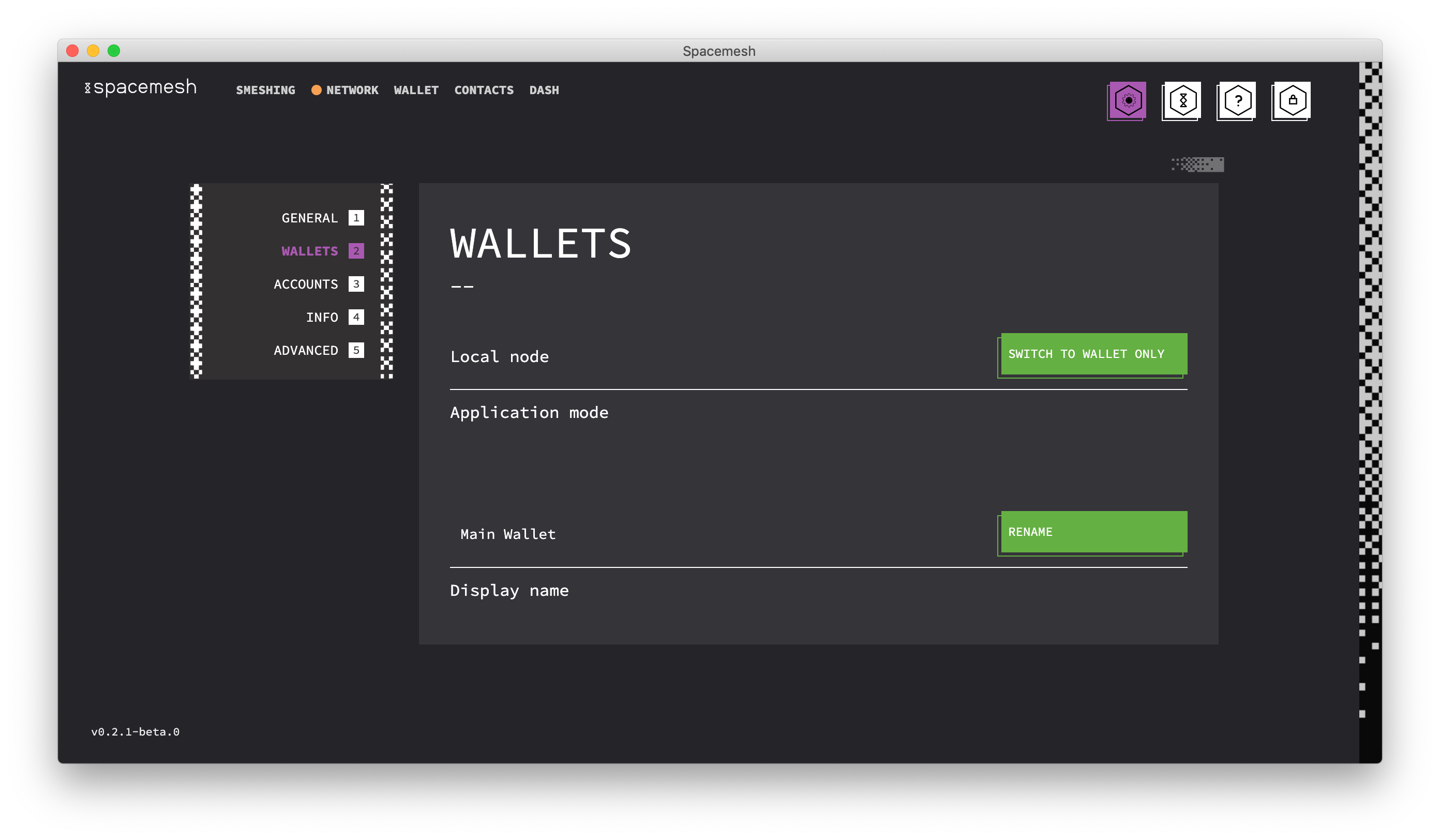 Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式
Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式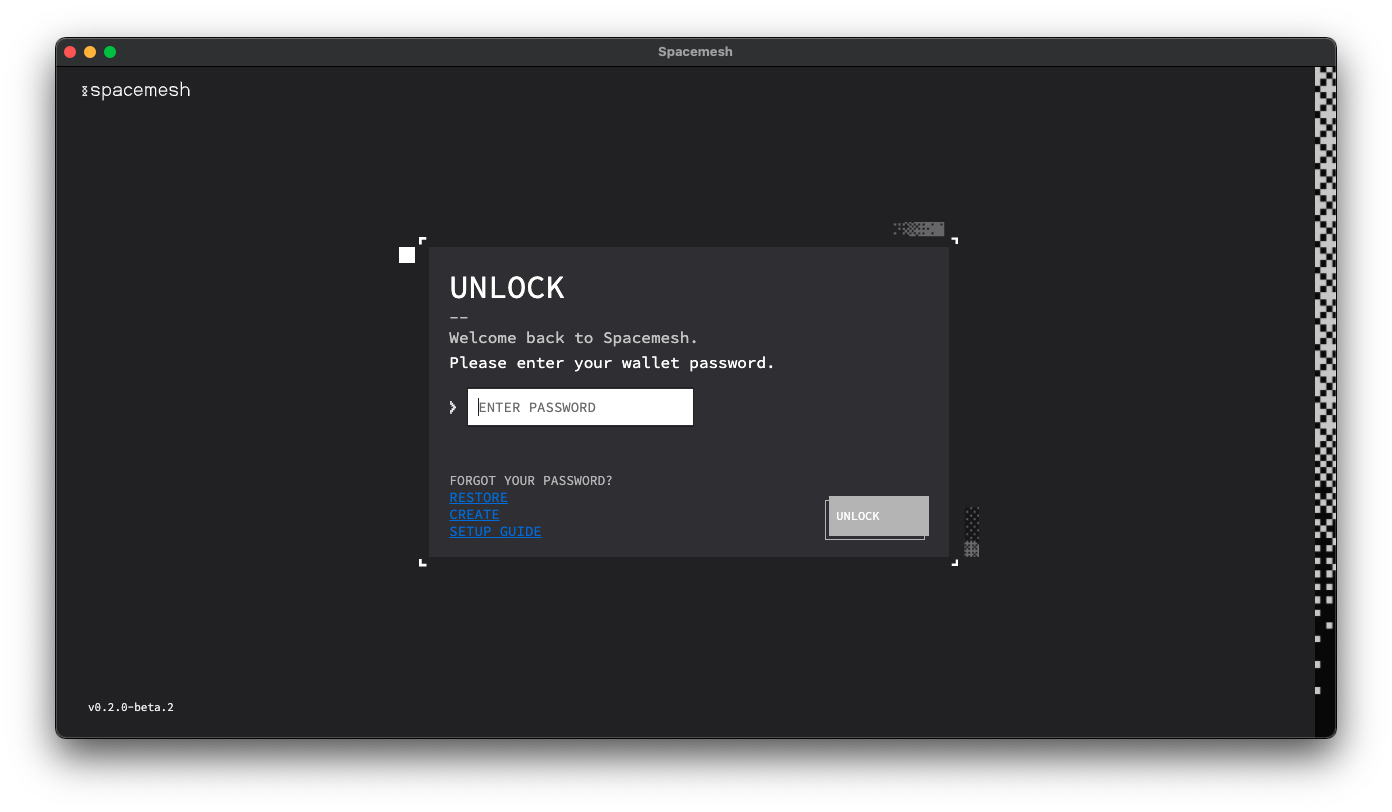 使用Spacemesh钱包操作教程和使用方法Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式使用Spacemesh钱包操作教程和使用方法Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法
使用Spacemesh钱包操作教程和使用方法Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式使用Spacemesh钱包操作教程和使用方法Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式Spacemesh切换到仅钱包模式使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法使用Spacemesh钱包操作教程和使用方法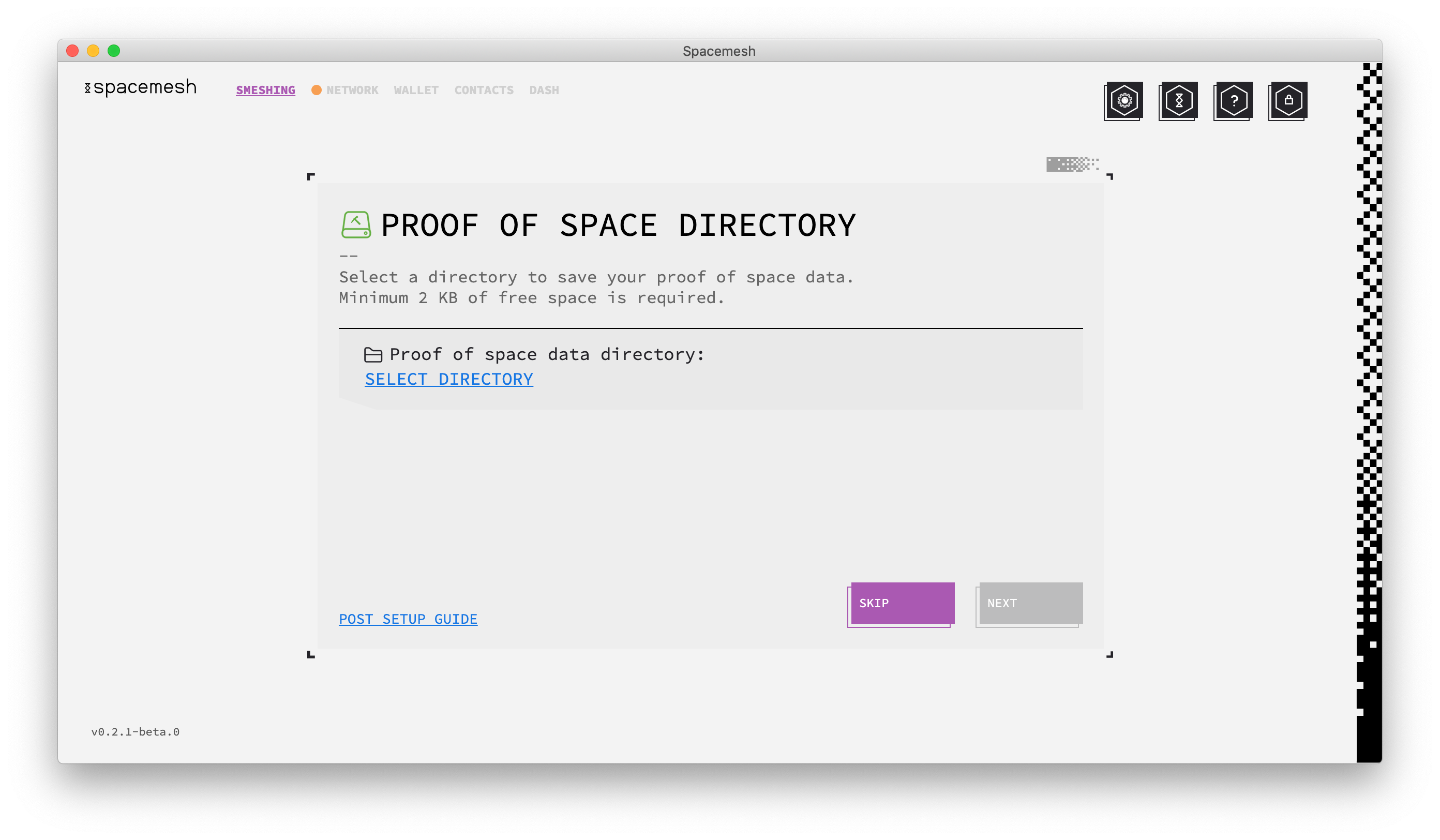 Smeshing POS操作过程
Smeshing POS操作过程




